Chapter 11: Q30P (page 461)
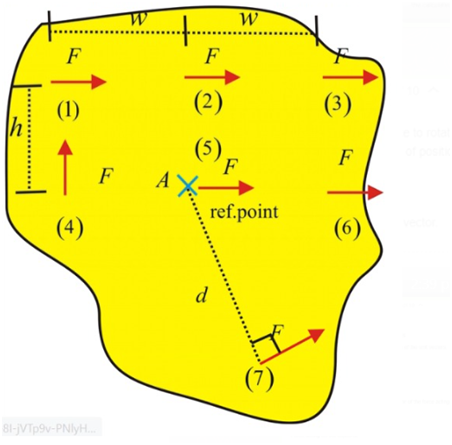
As shown in figure, seven forces all with magnitude \(\left| {\overrightarrow F } \right| = 25{\rm{ N}}\) are applied to an irregularly shaped object. Each force is applied at a different location on the object, indicated by the tail of the arrow; the directions of the force differ. The distances shown in the diagram have these values: \(w = 9{\rm{ m}},{\rm{ }}h = 14{\rm{ m}}\)and\(d = 13{\rm{ m}}\). For each force, calculate the \(z\)-component of the torque due to that force, relative to location A (\(x\) to the right, \(y\)up, \(z\) out of the page). Make sure you give the correct sign. Relative to location A, what is the \(z\) component of the net torque acting this object?
Short Answer
The \(z\)component of toque acting at point 1 is,\(\tau = \left( { - 350{\rm{ N}} \cdot {\rm{m}}} \right)\widehat k\)
The \(z\)component of toque acting at point 2 is,\(\tau = \left( { - 350{\rm{ N}} \cdot {\rm{m}}} \right)\widehat k\)
The \(z\)component of toque acting at point3 is,\(\tau = \left( { - 350{\rm{ N}} \cdot {\rm{m}}} \right)\widehat k\)
The \(z\)component of toque acting at point 4 is,\(\tau = \left( { - 225{\rm{ N}} \cdot {\rm{m}}} \right)\widehat k\)
The \(z\)component of toque acting at point 5 is,\(\tau = \left( {0{\rm{ N}} \cdot {\rm{m}}} \right)\widehat k\)
The \(z\)component of toque acting at point 6 is,\(\tau = \left( {0{\rm{ N}} \cdot {\rm{m}}} \right)\widehat k\)
The \(z\)component of toque acting at point 7 is,\(\tau = \left( {325{\rm{ N}} \cdot {\rm{m}}} \right)\widehat k\)
The net is torque on the object is\(\left( { - {\rm{950 N}} \cdot {\rm{m}}} \right)\widehat k\).
Step by step solution
Definition of moment of inertia and angular momentum:
Angular momentum, property characterizing the rotary inertia of an object or system of objects in motion about an axis that may or may not pass through the object or system.
Moment of inertia is defined as the quantity expressed by the body resisting angular acceleration which is the sum of the product of the mass of every particle with its square of a distance from the axis of rotation.
The torque can be defined as a tendency of a force to rotate an object about an axis. Torque acting at a point on the object is the cross product of position vector of the point and the force vector.
\(\tau = \overrightarrow r \times \overrightarrow F \)
Here, \(\overrightarrow r \)is the position vector and \(\overrightarrow F \)is the force vector.
The following sketch shows the directions of the forces acting on the irregular shaped object.
Find the torque at point 1:
Let the unit vector \(\widehat i,\widehat j,\widehat k\)along the \(x,y,z - \)axis.
Use the following relations of the cross products of the unit vectors.
\(\begin{aligned}{}\widehat i \times \widehat j &= \widehat k,{\rm{ }}\widehat i \times \widehat i &= 0,\\\widehat j \times \widehat k &= \widehat i,{\rm{ }}\widehat j \times \widehat j &= 0,\\\widehat k \times \widehat i &= \widehat j,{\rm{ }}\widehat k \times \widehat k &= 0,\\\widehat i \times \widehat j &= \widehat k,{\rm{ }}\widehat j \times \widehat i &= - \widehat k\end{aligned}\)
Take the reference point at A, the position vector of the force acting at point 1 is,
\(\begin{aligned}{c}\overrightarrow r = - w\widehat i \times h\widehat j\\ = - \left( {9{\rm{ m}}} \right)\widehat i + \left( {14{\rm{ m}}} \right)\widehat j\end{aligned}\)
Force acting on the object is,
\(\overrightarrow F = \left( {25{\rm{ N}}} \right)\widehat i\)
The torque experience by the force at point 1 is,
\(\begin{aligned}{}\tau &= \overrightarrow r \times \overrightarrow F \\ &= \left( { - \left( {9{\rm{ m}}} \right)\widehat i + \left( {14{\rm{ m}}} \right)\widehat j} \right) \times \left( {25{\rm{ N}}} \right)\widehat i\\ &= - \left( {25 \times 9{\rm{ N}} \cdot {\rm{m}}} \right)\left( {\widehat i \times \widehat i} \right) + \left( {25 \times 14{\rm{ N}} \cdot {\rm{m}}} \right)\left( {\widehat j \times \widehat i} \right)\\ &= \left( { - 350{\rm{ N}} \cdot {\rm{m}}} \right)\left( {\widehat k} \right)\end{aligned}\)
Step 3:Find the torque at point 2:
The position vector of the force acting at point 2 with respect to the reference point A is,
\(\begin{aligned}{}\overrightarrow r & = - 0\widehat i + h\widehat j\\ &= - \left( {0{\rm{ m}}} \right)\widehat i + \left( {14{\rm{ m}}} \right)\widehat j\end{aligned}\)
Force acting on the object is,
\(\overrightarrow F = \left( {25{\rm{ N}}} \right)\widehat i\)
The torque experienced by the force at point 2 is,
\(\begin{aligned}{}\tau &= \overrightarrow r \times \overrightarrow F \\ &= \left( { - 0\widehat i + \left( {14{\rm{ m}}} \right)\widehat j} \right) \times \left( {25{\rm{ N}}} \right)\widehat i\\ &= \left( {25 \times 14} \right){\rm{ N}} \cdot {\rm{m}}\left( {\widehat j \times \widehat i} \right)\\ &= \left( { - 350{\rm{ N}} \cdot {\rm{m}}} \right)\left( {\widehat k} \right)\end{aligned}\)
Find the torque at point 3:
The position vector of the force acting at point 3 with respect to the reference point A is,
\(\begin{aligned}{}\overrightarrow r &= w\widehat i + h\widehat j\\ &= - \left( {9{\rm{ m}}} \right)\widehat i + \left( {14{\rm{ m}}} \right)\widehat j\end{aligned}\)
Force acting on the object is
\(\overrightarrow F = \left( {25{\rm{ N}}} \right)\widehat i\)
The torque experienced by the force at point 3 is,
\(\begin{aligned}{}\tau &= \overrightarrow r \times \overrightarrow F \\ &= \left( {\left( {9{\rm{ m}}} \right)\widehat i + \left( {14{\rm{ m}}} \right)\widehat j} \right) \times \left( {25{\rm{ N}}} \right)\widehat i\\& = \left( {25 \times 14} \right){\rm{ N}} \cdot {\rm{m}}\left( {\widehat j \times \widehat i} \right) + \left( {25 \times 14} \right){\rm{ N}} \cdot {\rm{m}}\left( {\widehat j \times \widehat i} \right)\\ &= \left( { - 350{\rm{ N}} \cdot {\rm{m}}} \right)\left( {\widehat k} \right)\end{aligned}\)
Find the torque at point 4
The position vector of the force acting at point 4 with respect to the reference point is,
\(\begin{aligned}{c}\overrightarrow r = w\widehat i + 0\widehat j\\ = - \left( {9{\rm{ m}}} \right)\widehat i + \left( {0{\rm{ m}}} \right)\widehat j\end{aligned}\)
Force acting on the object is
\(\overrightarrow F = \left( {25{\rm{ N}}} \right)\widehat i\)
The torque experienced by the force at point 3 is,
\(\begin{aligned}{c}\tau = \overrightarrow r \times \overrightarrow F \\ = \left( { - \left( {9{\rm{ m}}} \right)\widehat i + \left( {0{\rm{ N}}} \right)\widehat j} \right) \times \left( {25{\rm{ N}}} \right)\widehat i\\ = - \left( {25 \times 9} \right){\rm{ N}} \cdot {\rm{m}}\left( {\widehat i \times \widehat j} \right)\\ = \left( { - 225{\rm{ N}} \cdot {\rm{m}}} \right)\left( {\widehat k} \right)\end{aligned}\)
Over 30 million students worldwide already upgrade their learning with 91Ӱ��!