Chapter 7: Eigenvalues and Eigenvectors
Q7-56E
TRUE OR FALSE
56. Ifis a nonzero vector in, then must be an eigenvector of matrix.
Q7-58E
TRUE OR FALSE
58. Ifis an eigenvector of a 2x2matrix, thenmust be an eigenvector of its classical adjointas well.
Q7.6-29E
Consider an invertible n × n matrix A such that the zero state is a stable equilibrium of the dynamical system.What can you say about the stability of the systems
Q7.6-30E
Consider an invertible n × n matrix A such that the zero state is a stable equilibrium of the dynamical system.What can you say about the stability of the systems
Q7.6-31E
Let A be a real 2 × 2 matrix. Show that the zero state is a stable equilibrium of the dynamical systemif (and only if)
Q7.6-32E
Let’s revisit the introductory example of Section 7.5: The glucose regulatory system of a certain patient can be modeled by the equations
Find closed formulas for g(t) and h(t), and draw the trajectory. Does your trajectory look like the one on page 361?
Q7.6-33E
Consider a real 2 × 2 matrix A with eigenvalues and corresponding eigenvectors.Show that if a real vectoris written asthen .
Q7.6-35E
(a). Consider a real n × n matrix with n distinct real eigenvalueswherefor all i =. Letbe a trajectory of the dynamical system. Show that this trajectory is bounded; that is, there is a positive number M such thatfor all positive integers t.
(b). Are all trajectories of the dynamical system
bounded? Explain.
Q7.6-36E
Show that the zero state is a stable equilibrium of the dynamical system if (and only if )(meaning that all entries ofapproach zero).
Q7.6-37E
Consider the national income of a country, which consists of consumption, investment, and government expenditures. Here we assume the government expenditure to be constant, at G0, while the national income Y(t), consumption C(t) , and investment I(t) change over time. According to a simple model, we have
Where is the marginal propensity to consume and is the acceleration coefficient. (See Paul E. Samuelson, “Interactions between the Multiplier Analysis and the Principle of Acceleration,” Review of Economic Statistics, May 1939, pp. 75-78.)
- Find the equilibrium solution of these equations, when .
- Let be the deviations of, , and , respectively, from the equilibrium state you found in part (a). These quantities are related by the equations
(Verify this!) By substituting y(t) into the second equations, set up equations of the form - When and , determine the stability of zero state of this system.
- When (and is arbitrary, ), determine the stability of the zero state.
- For each of the four sectors in the plane, determine the stability of the zero state.
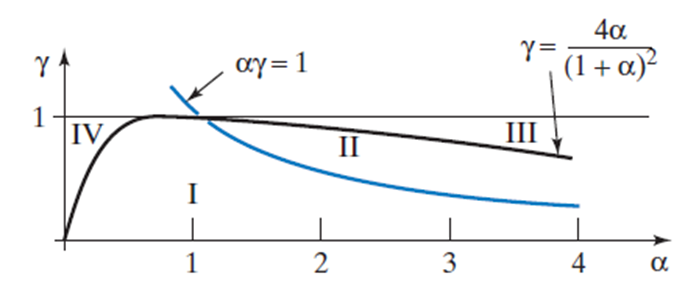
Discuss the various cases, in practical terms.
