Chapter 5: Q5.6-7E (page 267)
Let A have the properties described in Exercise 1.
(a) Is the origin an attractor, a repeller, or a saddle point of the dynamical system\({x_{k + 1}} = A{x_k}\)?
(b) Find the directions of greatest attraction and/or repulsion for this dynamical system.
(c) Make a graphical description of the system, showing the directions of greatest attraction or repulsion. Include a rough sketch of several typical trajectories (without computing specific points).
\(\)
Short Answer
(a) Saddle point is \(\left| 3 \right| > 1\) and \(\left| {1/3} \right| < 1\).
(b) The eigenvector corresponding to the eigenvalue greater than 1.
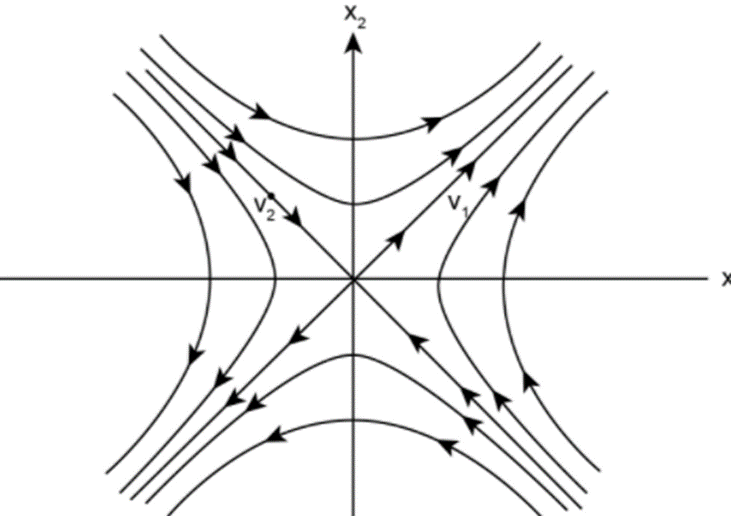
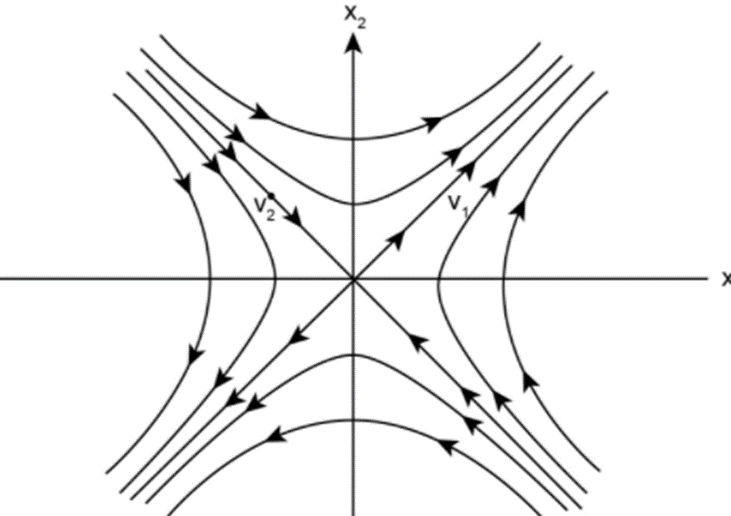
(c) The graphical representation is shown below:
Step by step solution
The condition for the repeller
a)
The eigenvalues of the matrix \(A\) in Exercise 1 are 3 and 1/3. The origin is a saddle point because \(\left| 3 \right| > 1\) and \(\left| {1/3} \right| < 1\).
The condition for repulsion
b)
The direction of the greatest attraction is determined by the eigenvector.
\(\)
The eigenvector corresponds to the eigenvalue with an absolute value less than 1.
The direction of greatest repulsion is determined by \({{\rm{v}}_1} = \left( {\begin{aligned}{}1\\1\end{aligned}} \right)\).
The eigenvector corresponds to the eigenvalue greater than 1.
The condition for the graph
c)
Lines through the eigenvectors and the origin.
Arrows toward the origin (showing attraction) on the line through \({{\rm{v}}_2}\) and arrows away from the origin (showing repulsion) on the line through \({{\rm{v}}_1}\),
Several typical trajectories (with arrows) that show the general flow of points are shown in the diagram below. Other than \({{\rm{v}}_1}\) and \({{\rm{v}}_2}\), no precise points were computed.
This is the only sort of drawing that can be made without utilizing a computer to plot points.
Over 30 million students worldwide already upgrade their learning with 91Ӱ��!
