Rigid Body Nutation. Euler’s equations describe the motion of the principal-axis components of the angular velocity of a freely rotating rigid body (such as a space station), as seen by an observer rotating with the body (the astronauts, for example). This motion is called nutation. If the angular velocity components are denoted by x, y, and z, then an example of Euler’s equations is the three-dimensional autonomous system
\(\begin{array}{l}\frac{{{\bf{dx}}}}{{{\bf{dt}}}}{\bf{ = yz}}\\\frac{{{\bf{dy}}}}{{{\bf{dt}}}}{\bf{ = - 2xz}}\\\frac{{{\bf{dz}}}}{{{\bf{dt}}}}{\bf{ = xy}}\end{array}\)
The trajectory of a solution x(t),y(t), z(t) to these equations is the curve generated by the points (x(t), y(t), z(t) ) in xyz-phase space as t varies over an interval I.
(a) Show that each trajectory of this system lies on the surface of a (possibly degenerate) sphere centered at the origin (0, 0, 0).[Hint: Compute\(\frac{{\bf{d}}}{{{\bf{dt}}}}{\bf{(}}{{\bf{x}}^{\bf{2}}}{\bf{ + }}{{\bf{y}}^{\bf{2}}}{\bf{ + }}{{\bf{z}}^{\bf{2}}}{\bf{)}}\)What does this say about the magnitude of the angular velocity vector?
(b) Find all the critical points of the system, i.e., all points\({\bf{(}}{{\bf{x}}_{\bf{o}}}{\bf{,}}{{\bf{y}}_{\bf{o}}}{\bf{,}}{{\bf{z}}_{\bf{o}}}{\bf{)}}\) such that \({\bf{x(t) = }}{{\bf{x}}_{\bf{o}}}{\bf{,y(t) = }}{{\bf{y}}_{\bf{o}}}{\bf{,z(t) = }}{{\bf{z}}_{\bf{o}}}\) is a solution. For such solutions, the angular velocity vector remains constant in the body system.
(c) Show that the trajectories of the system lie along the intersection of a sphere and an elliptic cylinder of the form\({{\bf{y}}^{\bf{2}}}{\bf{ + 2}}{{\bf{x}}^{\bf{2}}}{\bf{ = C}}\) for some constant C. [Hint: Consider the expression for dy/dx implied by Euler’s equations.]
(d) Using the results of parts (b) and (c), argue that the trajectories of this system are closed curves. What does this say about the corresponding solutions?
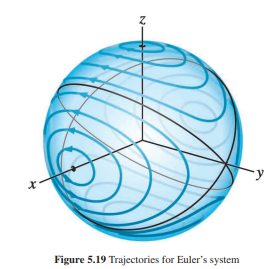
(e) Figure 5.19 displays some typical trajectories for this system. Discuss the stability of the three critical points indicated on the positive axes.