Chapter 5: Q7.6-21E (page 267)
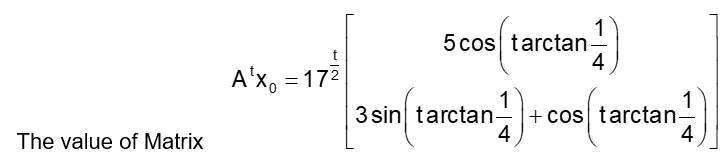
For the matrix A, find real closed formulas for the trajectorywhere . Draw a rough sketch
Short Answer
Expert verified
Step by step solution
01
Define Trajectory
A trajectory or flight path is the path that an object with mass in motion follows through space as a function of time. In classical mechanics, a trajectory is defined by Hamiltonian mechanics via canonical coordinates; hence, a complete trajectory is defined by position and momentum, simultaneously
02
Finding the trajectory

03
Solving the equation

Over 30 million students worldwide already upgrade their learning with 91Ӱ��!
